

ROSBAG RECORDER VD-4K
RAWデータ収録対応 映像+センサーデータの同期収録装置

車載映像・データ同期ソリューションが自動運転の市場で劇的な変化をもたらす3次元マップに必要なデータセットを作成でき、自動運転開発用のデータセットが作成できます。
※協働パートナー:アイシン精機
ROSBAGで同期収録、HD-RAW画像も30fps収録可能
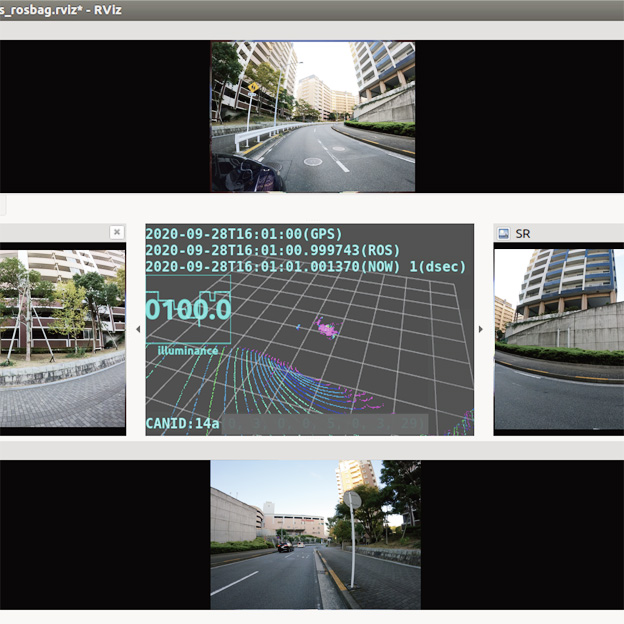
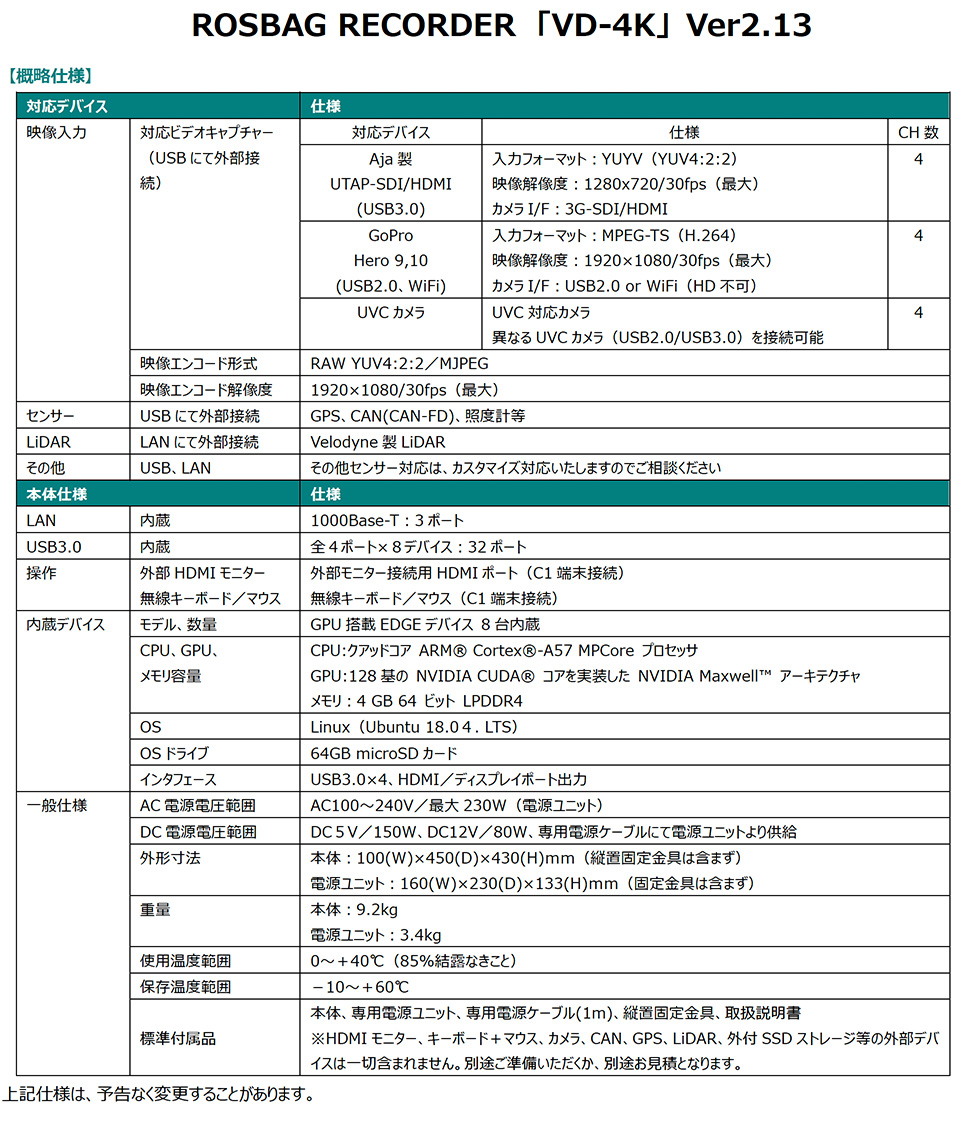
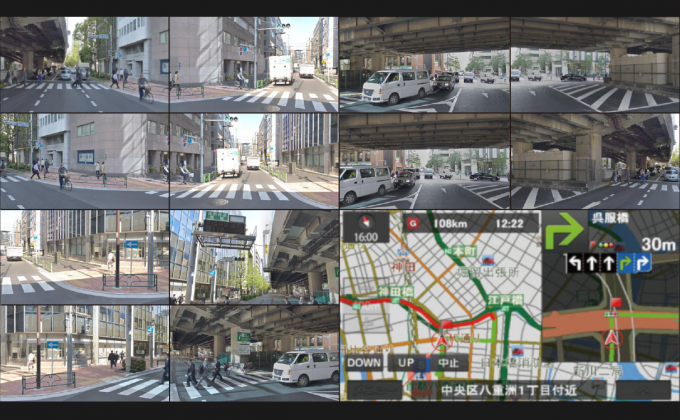
VD-4Kは自動運転社会の実現のため開発されたオープンな車載 データロガーです。 オープンなロボット用OSであるROS(Robot Operating System)を搭載し、 カメラ画像と多彩なセンサーデータを同期収録できます。 自動運転、ADAS開発に不可欠なディープラーニング用学習セット素材 テスト用データ等をローコストに収集します。 収録先はSSD、NAS、AWSクラウド等、テータ容量に合わせて複数選択できます。時刻はGPSで同期し、画像劣化がないRAWイメージ(YUV4:2:2)/フレーム相関がないモーションJPEG収録でセンサーデータに同期した画像フレーム抽出が容易になります。
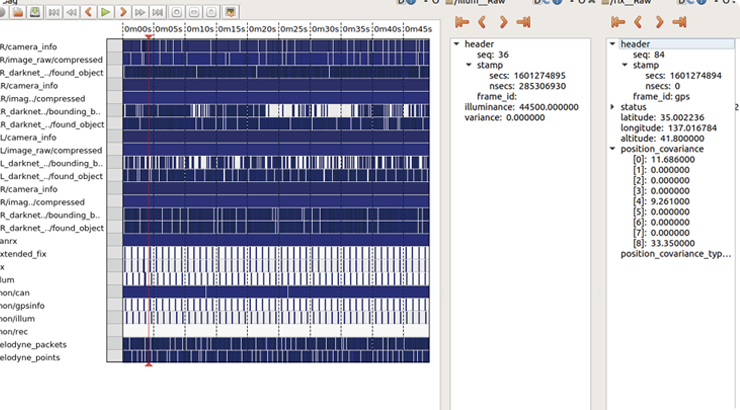
収録先はSSD、NAS、AWSクラウド等、テータ容量に合わせて複数選択できます。時刻はGPSで同期し、画像劣化がないRAWイメージ(YUV4:2:2)/フレーム相関がないモーションJPEG収録でセンサーデータに同期した画像フレーム抽出が容易になります。
ROSBAGで同期収録、HD-RAW画像も30fps収録可能
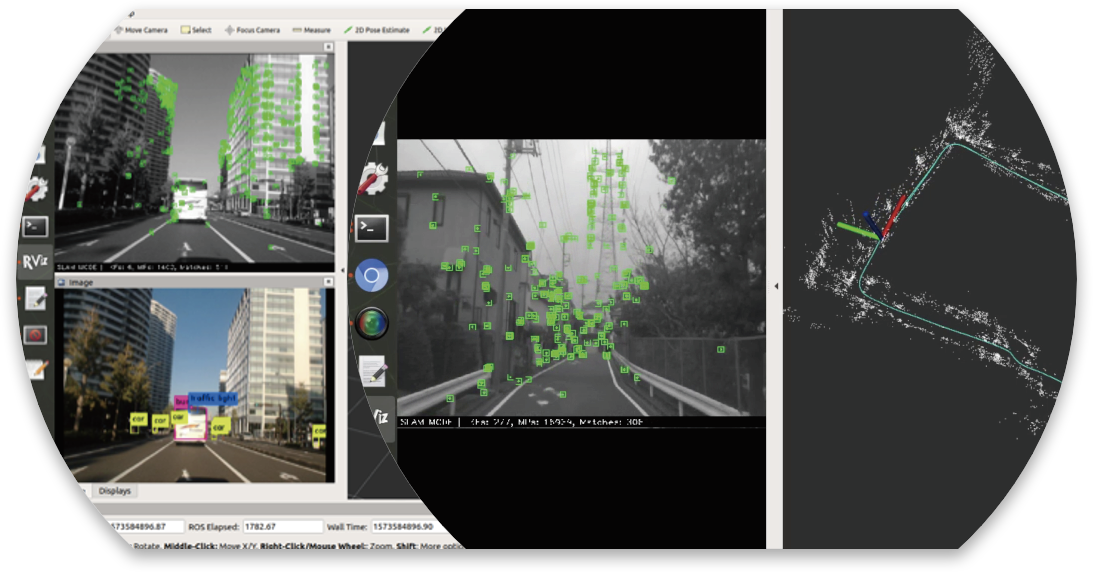
収録機能だけでなく、リアルタイムオブジェクトトラッキング機能を内蔵しており、車両、人、標識等の周囲メタ情報も自動収集します。例えば、右折時(CAN検索)に周囲に人がいる(メタ検索)場合等複雑な検索条件で膨大な収録データから特定事象のみを抽出できます。
オプションにてカメラによる自己位置推定(VSLAM)機能を搭載できLiDARを搭載しなくても周辺点群(ポイントクラウド)の収集と高精度な自己位置推定が可能です。
このようにご活用いただけます
仕様
オープンソースソフトウェアをベースにしているため、カスタマイズ対応が可能です。
CASE 最新の導入事例
CONTACT お問い合わせ
ライアンロボティクス株式会社に関するインターネットでのお問い合わせは下記まで、お気軽にご相談ください。
また、当ホームページについて、お気付きの点(誤字、脱字、リンク切れなどの不具合)がございましたら、
お問い合わせフォームよりお知らせください。
お寄せいただきましたご意見は今後の参考とさせていただきます。
- ライアンロボティクスシステムズ株式会社
- 〒222-0033 神奈川県横浜市港北区新横浜2-5-14
Wise Next新横浜3F
Tel.045-370-7244